Tesis
1 Introducción

En este trabajo se aborda el problema de reconocimiento automático de glifos del alfabeto náhuatl mediante el uso de redes neuronales convolucionales (Convolutional Neural Networks, CNN). Este problema puede formularse como una tarea de clasificación de imágenes, en la cual cada glifo es representado mediante una estructura matricial que codifica su información visual.
Los glifos presentan variaciones en forma, trazo y estilo, lo que dificulta su identificación mediante métodos tradicionales. En este contexto, las CNN resultan particularmente adecuadas debido a su capacidad para extraer características espaciales relevantes directamente a partir de los datos, tales como bordes, curvas y patrones geométricos distintivos.
2 Formulación Matemática de una CNN
Una red neuronal convolucional puede modelarse como una aplicación parametrizada:
\[ f(\cdot , \theta): \mathcal{X} \subseteq \mathbb{R}^{H \times W \times C} \longrightarrow \mathbb{R}^{k} \tag{1}\]
donde:
- \(\mathcal{X}\) es el espacio de entrada (por ejemplo, imágenes),
- \(H\) representa la altura (height) de la imagen, es decir, el número de filas,
- \(W\) representa el ancho (width), es decir, el número de columnas,
- \(C\) representa el número de canales (channels), que corresponde a la cantidad de valores asociados a cada píxel,
- \(k\) es la dimensión del espacio de salida (por ejemplo, número de clases en clasificación),
- \(\theta\) denota el conjunto total de parámetros entrenables del modelo.
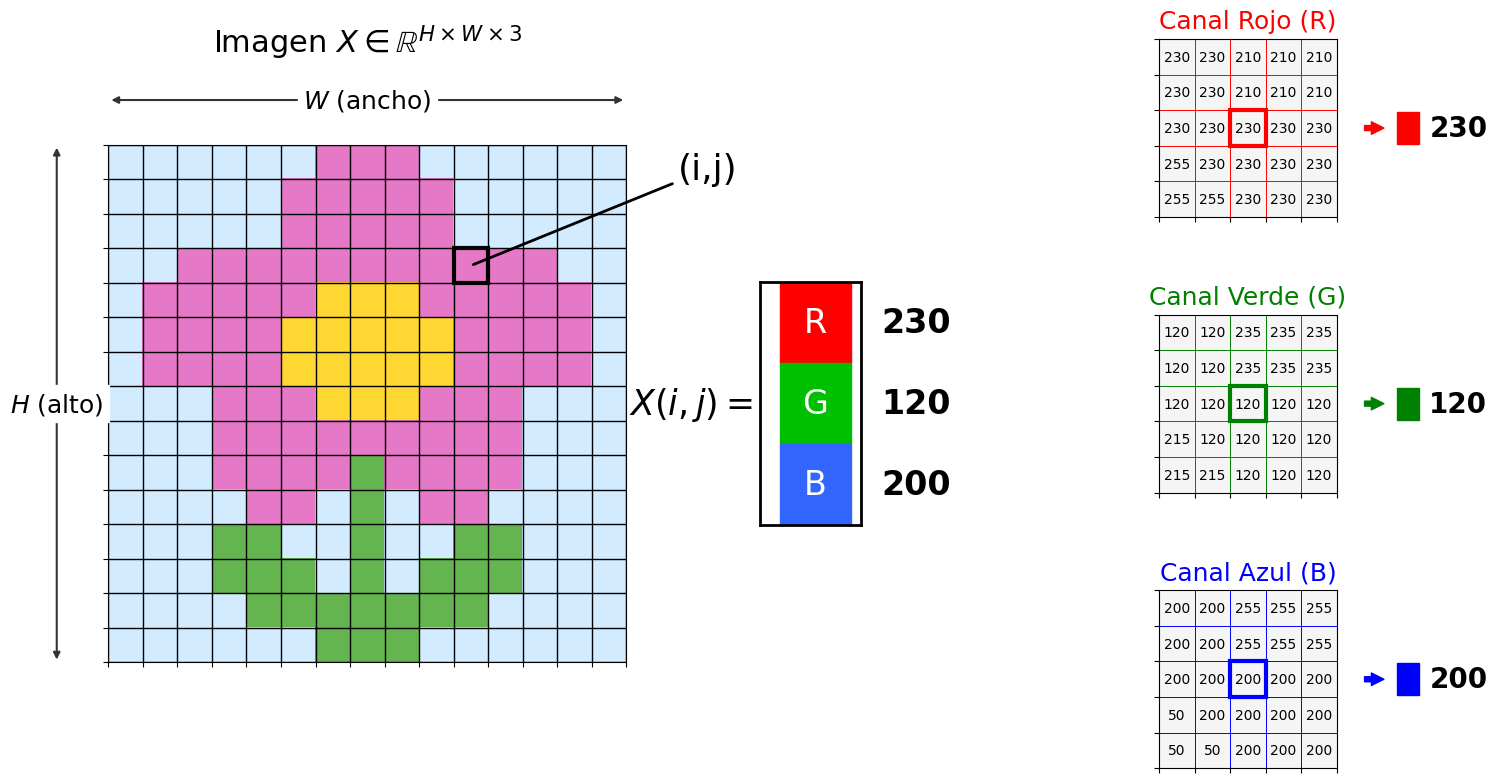
3 Representación Tensorial de Imágenes
Una imagen digital se representa como un tensor de orden tres:
\[ X \in \mathbb{R}^{H \times W \times C} \tag{2}\]
Esto implica que para cada posición espacial \((i,j)\):
\[ X(i,j) = \left(x_1, x_2, \dots, x_C \right) \in \mathbb{R}^C \tag{3}\]
Por tanto, cada píxel contiene un vector que describe información en distintos canales.
4 Estructura Funcional de la Red
Una CNN se construye como la composición de funciones:
\[ f(x;\theta) = f^{(L)} \circ f^{(L-1)} \circ \cdots \circ f^{(1)}(x) \tag{4}\]
donde \(L \in \mathbb{N}\) es el número total de capas de la red y cada \(f^{(l)}\) representa una transformación asociada a la capa \(l\)-ésima.
Asimismo, los parámetros globales se expresan como:
\[ \theta = \left\{ \theta^{(1)}, \theta^{(2)}, \dots, \theta^{(L)} \right\} \tag{5}\]
5 Parámetros del Modelo
Los parámetros de una CNN están constituidos principalmente por:
- Kernels (filtros convolucionales),
- Sesgos asociados a cada filtro.
Estos parámetros determinan completamente la función \(f(x;\theta)\) y son ajustados mediante procedimientos de optimización basados en gradiente.
6 Kernels Convolucionales
6.1 Definición Formal
Un kernel es un tensor de parámetros que define un operador lineal local.
Caso unicanal:
\[ K \in \mathbb{R}^{k_h \times k_w} \tag{6}\]
cuyos elementos se indexan como:
\[ K(u,v), \quad u \in \{0,\dots,k_h-1\}, \; v \in \{0,\dots,k_w-1\} \]
Caso multicanal:
\[ K \in \mathbb{R}^{k_h \times k_w \times C} \tag{7}\]
con entradas:
\[ K(u,v,c), \quad u \in \{0,\dots,k_h-1\}, \; v \in \{0,\dots,k_w-1\}, \; c \in \{1,\dots,C\} \]
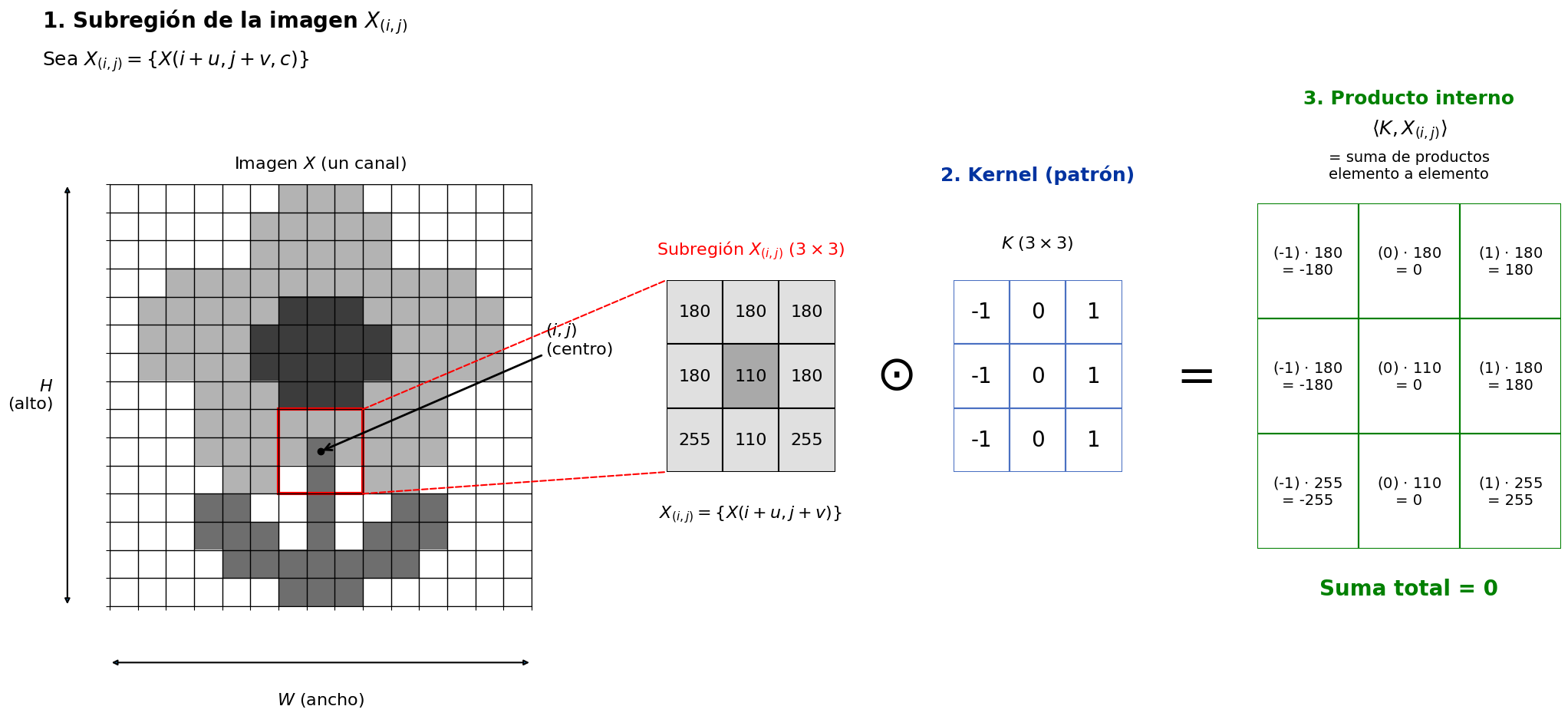
6.2 Interpretación Geométrica
Sea \(X_{(i,j)}\) una subregión de la imagen obtenida al centrar el kernel en la posición \((i,j)\), cuyos elementos están dados por:
\[ X(i+u, j+v, c) \]
para los mismos índices \((u,v,c)\) definidos anteriormente.
El producto interno:
\[ \langle K, X_{(i,j)} \rangle \tag{8}\]
mide la similitud entre el patrón definido por el kernel y la región local de la imagen.
6.3 Compartición de parámetros
Una propiedad fundamental de las redes neuronales convolucionales es la compartición de parámetros, la cual establece que los coeficientes del kernel no dependen de la posición espacial en la que se aplica la operación.
Formalmente, si \(K\) es un kernel convolucional, entonces:
\[ K(u,v,c) \text{ es independiente de la posición } (i,j) \]
Esto implica que el mismo kernel es utilizado para procesar todas las regiones locales de la entrada.
6.3.1 Reducción del número de parámetros
En ausencia de compartición de parámetros, cada posición \((i,j)\) requeriría un conjunto distinto de pesos, lo cual conduciría a un número total de parámetros del orden:
\[ H \cdot W \cdot k_h \cdot k_w \cdot C \]
Sin embargo, al emplear un único kernel compartido, el número de parámetros se reduce a:
\[ k_h \cdot k_w \cdot C \]
lo cual representa una reducción significativa en la complejidad del modelo.
6.3.2 Invarianza traslacional
La compartición de parámetros induce una propiedad de equivarianza por traslación. Sea \(\tau_{a,b}\) un operador de traslación definido sobre la entrada. Entonces, la operación de convolución satisface:
\[ \mathcal{T}_K(\tau_{a,b} X) = \tau_{a,b} (\mathcal{T}_K X) \tag{9}\]
Esto implica que si una característica aparece en diferentes posiciones espaciales, el modelo será capaz de detectarla de manera consistente.
En consecuencia, la red no depende de la posición absoluta de los patrones, sino únicamente de su estructura local.
7 Operación de Convolución
La operación fundamental en una red neuronal convolucional es la denominada convolución discreta. No obstante, es importante señalar que en el contexto de aprendizaje profundo, la operación implementada corresponde en realidad a la correlación cruzada, ya que no se realiza la inversión del kernel. A pesar de esta diferencia técnica, en la literatura se mantiene el término ``convolución’’ por convención.
Esta operación define un mecanismo mediante el cual se evalúa la similitud entre un patrón local (kernel) y distintas regiones de la imagen de entrada.
7.1 Caso Unicanal
Sea una imagen unicanal representada por:
\[ X \in \mathbb{R}^{H \times W} \]
y un kernel:
\[ K \in \mathbb{R}^{k_h \times k_w} \]
La operación de convolución produce una salida \(Y\), definida en cada posición \((i,j)\) como:
\[ Y(i,j) = \sum_{u=0}^{k_h-1} \sum_{v=0}^{k_w-1} K(u,v)\, X(i+u, j+v) \tag{10}\]
donde:
- \((i,j)\) denota la posición de la ventana deslizante,
- \((u,v)\) recorre las coordenadas internas del kernel,
- \(X(i+u, j+v)\) representa la región local de la imagen.
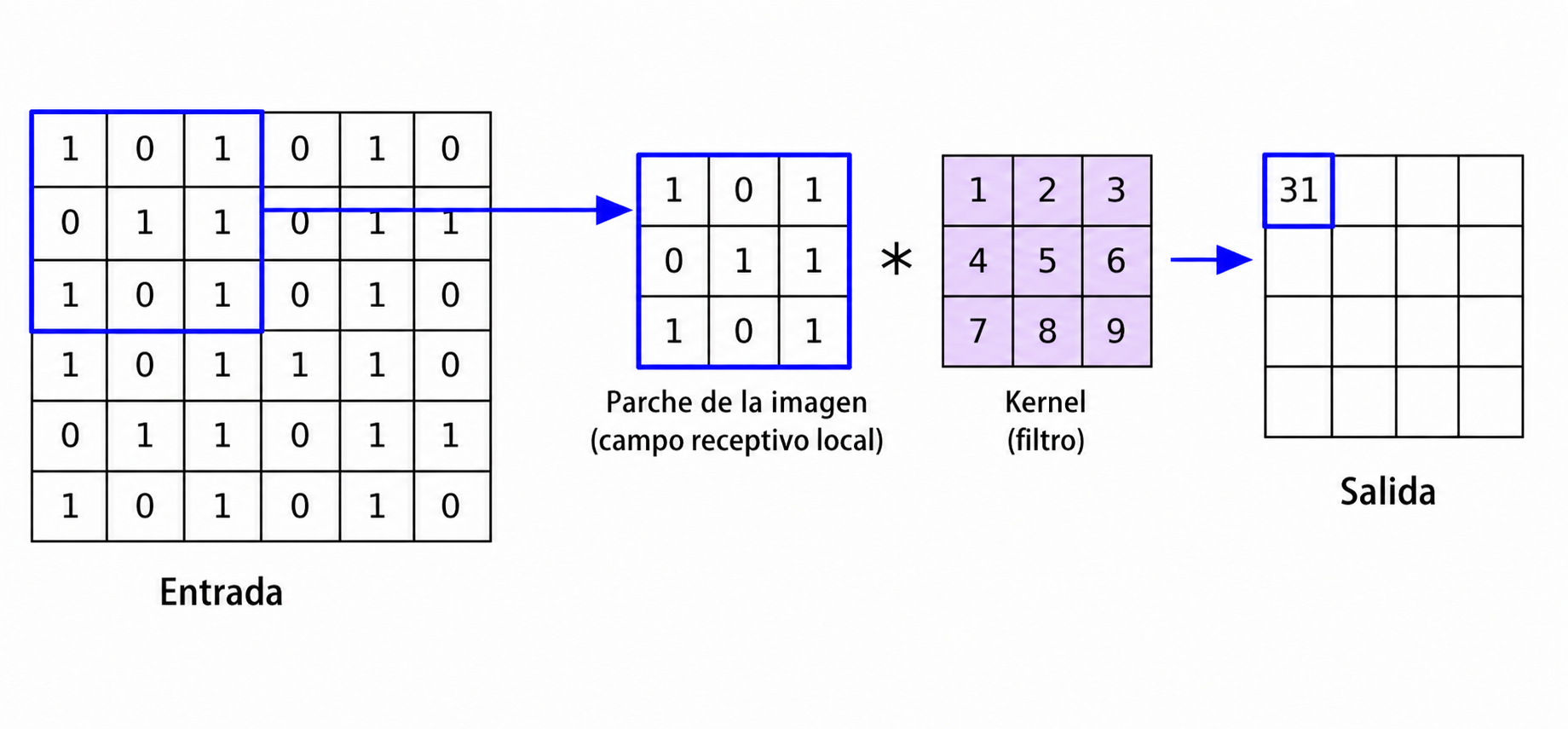
7.1.1 Interpretación como ventana deslizante
La ecuación anterior describe un proceso en el cual el kernel se desplaza sistemáticamente sobre la imagen. En cada posición, se selecciona una submatriz de \(X\) de dimensiones \(k_h \times k_w\), sobre la cual se realiza una operación de agregación ponderada.
Formalmente, definimos la submatriz local como:
\[ X_{(i,j)} = \left\{ X(i+u, j+v) \right\}_{u,v} \]
Por lo tanto, la salida en \((i,j)\) depende únicamente de una vecindad local de la imagen, lo cual establece la propiedad de conectividad local.
7.1.2 Interpretación como producto interno
La expresión de la convolución puede reescribirse como un producto interno en el espacio vectorial \(\mathbb{R}^{k_h \times k_w}\):
\[ Y(i,j) = \langle K, X_{(i,j)} \rangle \tag{11}\]
donde el producto interno se define como:
\[ \langle A, B \rangle = \sum_{u=0}^{k_h-1} \sum_{v=0}^{k_w-1} A(u,v)\, B(u,v) \]
Esta formulación pone de manifiesto que la convolución mide el grado de alineación entre el kernel y la región local.
7.1.3 Interpretación geométrica
Desde un punto de vista geométrico, el valor \(Y(i,j)\) representa la proyección del vector \(X_{(i,j)}\) sobre el vector \(K\) en el espacio euclidiano de dimensión \(k_h k_w\). En consecuencia:
- Si \(X_{(i,j)}\) es similar a \(K\), entonces \(Y(i,j)\) será grande.
- Si son ortogonales, el resultado será cercano a cero.
- Si son opuestos, el valor será negativo.
Esto permite interpretar al kernel como un detector de patrones.
7.1.4 Naturaleza lineal de la operación
La convolución es un operador lineal. Es decir, para cualesquiera tensores \(X_1, X_2\) y escalares \(\alpha, \beta\), se cumple:
\[ \mathcal{T}_K(\alpha X_1 + \beta X_2) = \alpha \mathcal{T}_K(X_1) + \beta \mathcal{T}_K(X_2) \tag{12}\]
donde \(\mathcal{T}_K\) denota el operador de convolución asociado al kernel \(K\).
7.1.5 Relación con la correlación cruzada
Es importante destacar que la definición utilizada en redes neuronales corresponde a la correlación cruzada:
\[ Y(i,j) = \sum_{u,v} K(u,v)\, X(i+u, j+v) \]
mientras que la convolución clásica implicaría una inversión del kernel:
\[ Y(i,j) = \sum_{u,v} K(u,v)\, X(i-u, j-v) \]
Sin embargo, dado que los parámetros del kernel son aprendidos durante el entrenamiento, ambas formulaciones resultan equivalentes en términos de capacidad representacional.
7.1.6 Dependencia local
Finalmente, se observa que:
\[ Y(i,j) \text{ depende únicamente de } X_{(i,j)} \]
lo cual implica que cada salida está influenciada únicamente por una región local de la entrada. Esta propiedad es clave para la eficiencia computacional y la capacidad de generalización del modelo.
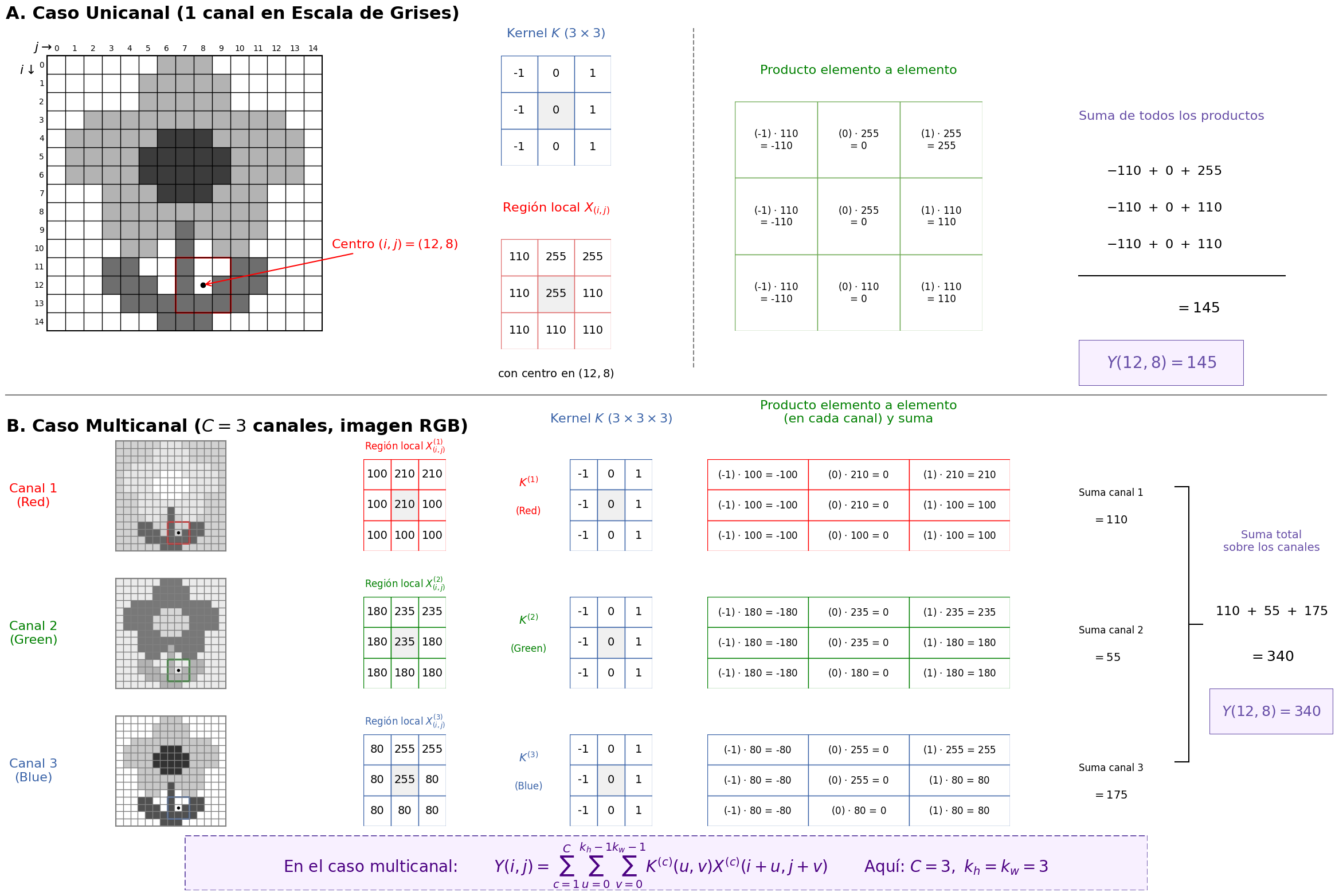
7.2 Convolución Multicanal
En el caso general, las imágenes no son unicanal, sino que poseen múltiples canales (por ejemplo, RGB). En consecuencia, la operación de convolución debe extenderse para considerar simultáneamente la información presente en cada canal.
Sea:
\[ X \in \mathbb{R}^{H \times W \times C} \]
una imagen con \(C\) canales, y sea un kernel:
\[ K \in \mathbb{R}^{k_h \times k_w \times C} \]
donde cada canal del kernel corresponde a un canal de la entrada.
La salida de la convolución en la posición \((i,j)\) está dada por:
\[ Y(i,j) = \sum_{c=1}^{C} \sum_{u=0}^{k_h-1} \sum_{v=0}^{k_w-1} K(u,v,c)\, X(i+u,j+v,c) \tag{13}\]
Esta expresión indica que la contribución de cada canal se calcula de manera independiente y posteriormente se agregan (suman) todas las contribuciones.
La operación anterior puede interpretarse como la suma de convoluciones unicanal:
\[ Y(i,j) = \sum_{c=1}^{C} Y^{(c)}(i,j) \]
donde:
\[ Y^{(c)}(i,j) = \sum_{u=0}^{k_h-1} \sum_{v=0}^{k_w-1} K(u,v,c)\, X(i+u,j+v,c) \]
Cada término \(Y^{(c)}(i,j)\) representa la contribución del canal \(c\) al valor final de la salida.
7.3 Interpretación como producto interno en espacio tensorial
Sea \(X_{(i,j)}\) la subregión local de la imagen centrada en \((i,j)\). Entonces:
\[ X_{(i,j)} \in \mathbb{R}^{k_h \times k_w \times C} \]
Al vectorizar ambos tensores:
\[ \mathrm{vec}(X_{(i,j)}) \in \mathbb{R}^{k_h k_w C}, \quad \mathrm{vec}(K) \in \mathbb{R}^{k_h k_w C} \]
la convolución puede escribirse como:
\[ Y(i,j) = \mathrm{vec}(K)^\top \mathrm{vec}(X_{(i,j)}) \tag{14}\]
Esto muestra que la operación es un producto interno en un espacio euclidiano de dimensión \(k_h k_w C\).
7.4 Interpretación geométrica
Desde un punto de vista geométrico, cada región local de la imagen se interpreta como un punto en el espacio \(\mathbb{R}^{k_h k_w C}\), y el kernel define una dirección en dicho espacio.
Por tanto:
- valores grandes de \(Y(i,j)\) indican alta alineación entre el patrón y la región,
- valores cercanos a cero indican baja correlación,
- valores negativos indican oposición estructural.
En consecuencia, el kernel actúa como un detector de patrones multicanal.
7.5 Naturaleza lineal
La convolución multicanal es un operador lineal. Es decir, para cualesquiera tensores \(X_1, X_2\) y escalares \(\alpha, \beta\), se cumple:
\[ \mathcal{T}_K(\alpha X_1 + \beta X_2) = \alpha \mathcal{T}_K(X_1) + \beta \mathcal{T}_K(X_2) \]
donde \(\mathcal{T}_K\) denota el operador de convolución asociado al kernel \(K\).
7.6 Interpretación estructural
Es importante destacar que, a diferencia del caso unicanal, el kernel multicanal no detecta únicamente patrones espaciales, sino también correlaciones entre canales.
Por ejemplo, en imágenes RGB, el kernel puede aprender a identificar combinaciones específicas de intensidades en los canales rojo, verde y azul, lo cual permite detectar patrones más complejos que aquellos basados únicamente en estructura espacial.
7.7 Forma Vectorizada
\[ Y(i,j) = K^\top X_{(i,j)} \]
8 Múltiples Filtros
En una red neuronal convolucional, no se utiliza un único kernel, sino un conjunto de filtros que permiten extraer distintas características de la entrada. Este conjunto se denota como:
\[ \left\{ K^{(f)} \right\}_{f=1}^{F}, \quad K^{(f)} \in \mathbb{R}^{k_h \times k_w \times C} \tag{15}\]
donde \(F\) representa el número total de filtros.
8.1 Definición de la salida
Cada filtro \(K^{(f)}\) actúa de manera independiente sobre la entrada y produce un mapa de activación asociado. Para cada posición \((i,j)\), la salida correspondiente al filtro \(f\) está dada por:
\[ Y_f(i,j) = \langle K^{(f)}, X_{(i,j)} \rangle \tag{16}\]
Por lo tanto, a cada filtro le corresponde una función:
\[ Y_f : \{1,\dots,H'\} \times \{1,\dots,W'\} \to \mathbb{R} \]
8.2 Estructura tensorial de la salida
Al considerar todos los filtros simultáneamente, la salida completa se organiza como un tensor de orden tres:
\[ Y \in \mathbb{R}^{H' \times W' \times F} \tag{17}\]
donde:
- \(H'\) y \(W'\) son las dimensiones espaciales de la salida,
- \(F\) es el número de canales de salida, también llamados mapas de características.
En particular, la componente \(Y(:,:,f)\) corresponde al mapa de activación generado por el filtro \(K^{(f)}\).
8.3 Interpretación funcional
Cada filtro puede interpretarse como un detector especializado en cierto tipo de patrón. En consecuencia, la colección de filtros define una familia de funciones:
\[ \left\{ \mathcal{T}_{K^{(f)}} \right\}_{f=1}^{F} \]
donde cada operador \(\mathcal{T}_{K^{(f)}}\) extrae una característica distinta de la entrada.
De este modo, la salida de la capa puede interpretarse como la aplicación conjunta de múltiples detectores, produciendo una representación enriquecida de la imagen.
8.4 Interpretación como vector de características local
Para cada posición \((i,j)\), la salida puede agruparse como un vector:
\[ Y(i,j) = \left( Y_1(i,j), Y_2(i,j), \dots, Y_F(i,j) \right) \in \mathbb{R}^{F} \tag{18}\]
Esto implica que cada posición espacial de la imagen original es transformada en un vector de características de dimensión \(F\).
Por tanto, la capa convolucional realiza una transformación:
\[ \mathbb{R}^{k_h \times k_w \times C} \longrightarrow \mathbb{R}^{F} \]
aplicada localmente en cada vecindad de la imagen.
8.5 Interpretación geométrica
Desde una perspectiva geométrica, cada filtro \(K^{(f)}\) define una dirección en el espacio \(\mathbb{R}^{k_h k_w C}\). En consecuencia, el vector \(Y(i,j)\) contiene las proyecciones de la región local \(X_{(i,j)}\) sobre cada una de estas direcciones.
Esto permite interpretar la salida como una representación de la información local en una base (no necesariamente ortogonal) definida por los filtros aprendidos.
8.6 Ejemplos de filtros
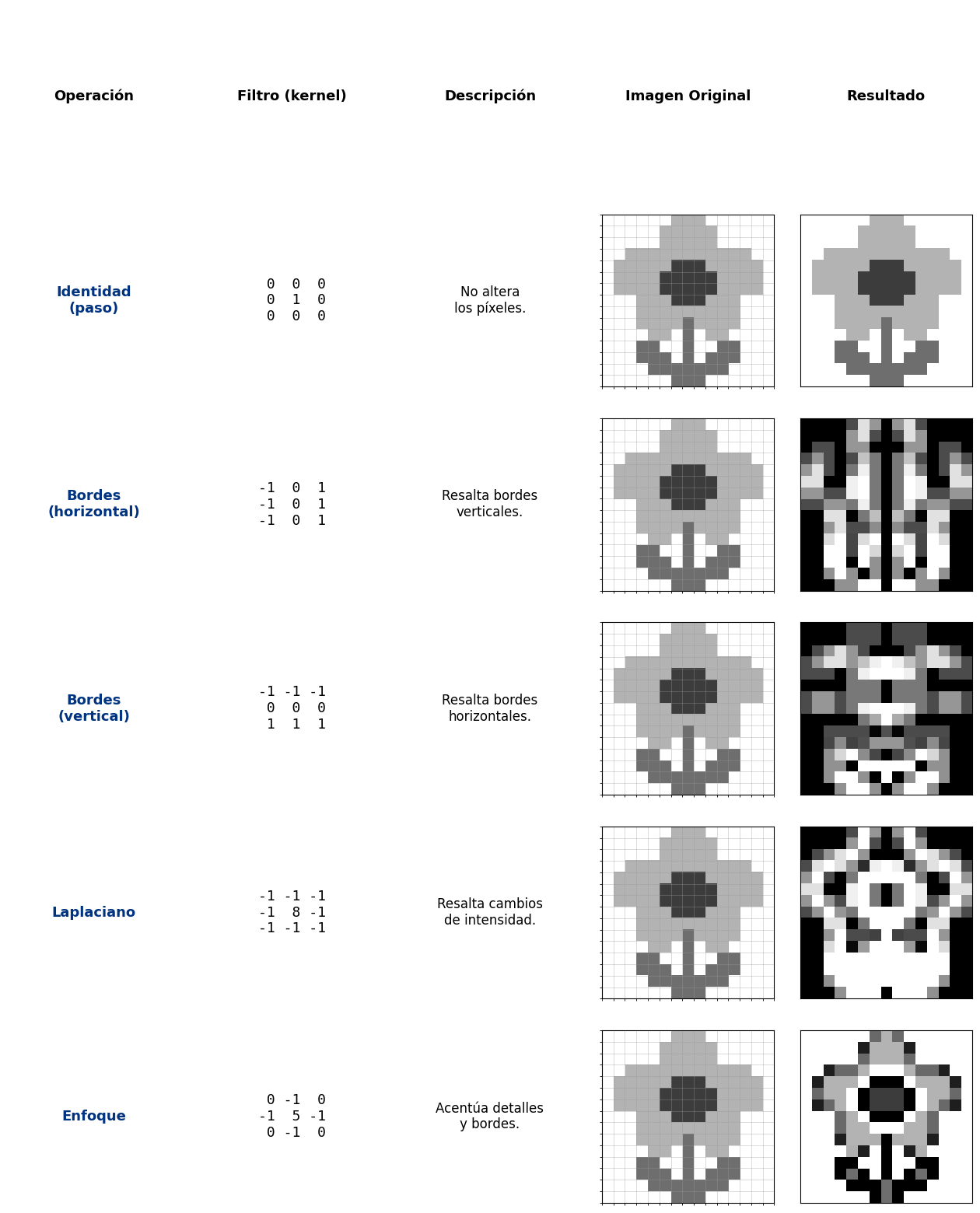
8.7 Observación estructural
Es importante notar que el número de filtros \(F\) determina la capacidad de representación de la capa. Un mayor número de filtros permite capturar una mayor variedad de patrones, pero también incrementa el número de parámetros y el costo computacional.
En capas profundas, los filtros tienden a representar características de mayor nivel semántico, construidas a partir de combinaciones de patrones detectados en capas anteriores.
9 Stride y Padding
9.1 Stride
El stride \(s\) controla el desplazamiento del kernel durante la operación de convolución. Es decir, determina cuántas posiciones se desplaza el kernel en cada paso.
Las dimensiones de salida están dadas por:
\[ H' = \left\lfloor \frac{H - k_h + 2p}{s} \right\rfloor + 1, \quad W' = \left\lfloor \frac{W - k_w + 2p}{s} \right\rfloor + 1 \tag{19}\]
donde:
- \(H, W\) son las dimensiones de la entrada,
- \(k_h, k_w\) son las dimensiones del kernel,
- \(p\) es el padding,
- \(s\) es el stride.
Un valor mayor de \(s\) produce una reducción en la resolución espacial de la salida.
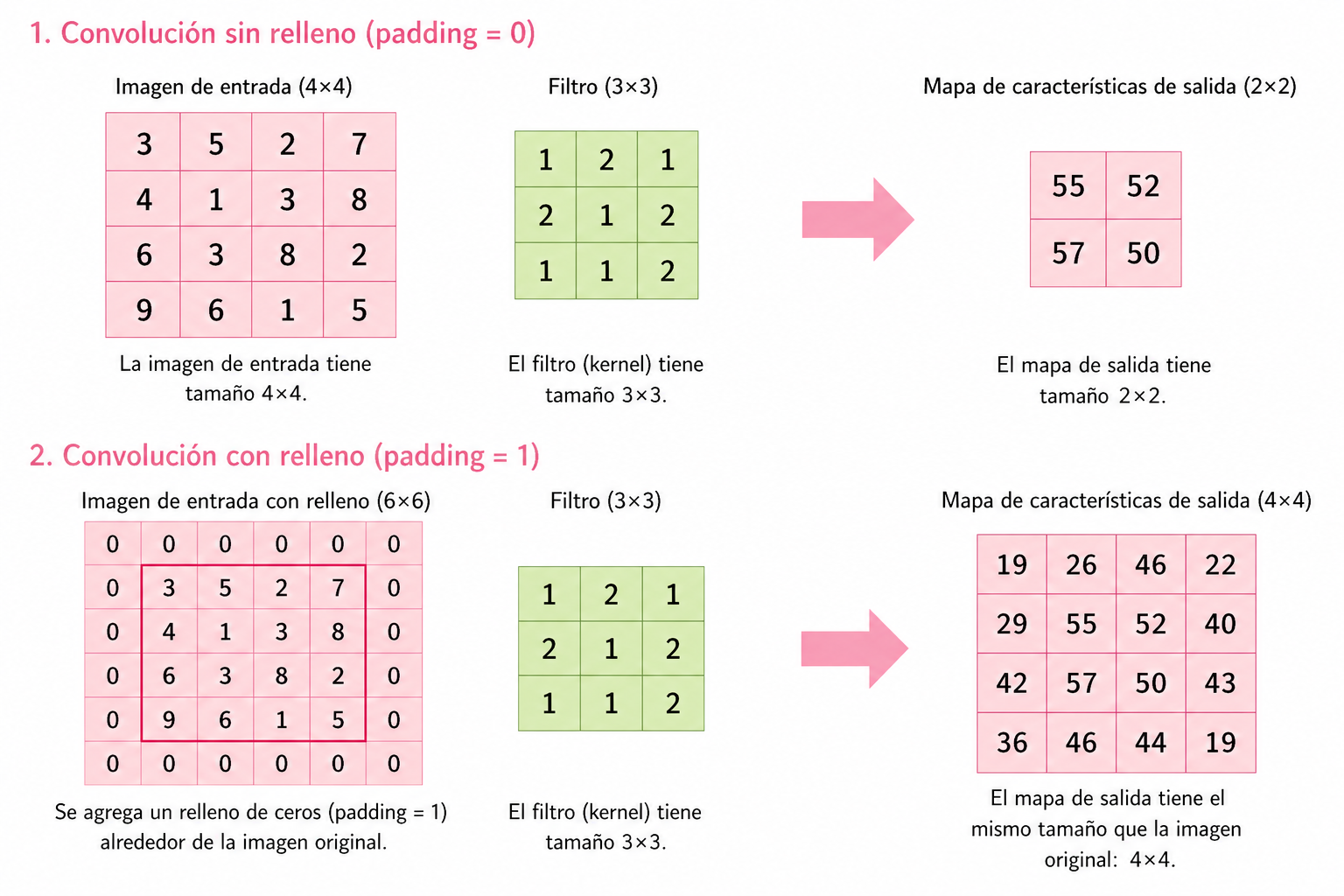
9.2 Padding
El padding es una operación que consiste en añadir valores (generalmente ceros) alrededor de la entrada antes de aplicar la convolución. Esto se hace para controlar el tamaño de la salida y preservar información en los bordes.
\[ X_{\text{pad}} \in \mathbb{R}^{(H+2p)\times(W+2p)\times C} \]
El padding puede interpretarse como una extensión de la función de entrada \(X\) fuera de su dominio original. Formalmente, se define la extensión \(\tilde{X}\) como:
\[ \tilde{X}(i,j) = \begin{cases} X(i,j), & \text{si } (i,j) \text{ pertenece al dominio original}, \\ 0, & \text{en otro caso} \end{cases} \]
Esta extensión corresponde a una extensión por cero del dominio de la función.
En una capa convolucional, el padding se aplica antes de la convolución. Por lo tanto, la operación completa de una capa convolucional con padding se puede expresar como:
\[ Y = \sigma\big( (\text{pad}(X)) \star K + b \big) \]
donde:
- \(X\) es el tensor de entrada,
- \(\text{pad}(X)\) es la entrada extendida mediante padding,
- \(\star\) denota la operación de correlación cruzada,
- \(K\) es el kernel o filtro,
- \(b\) es el sesgo,
- \(\sigma\) es la función de activación.
9.3 Ejemplo ilustrativo
Para ilustrar el efecto del padding sobre las dimensiones de salida, se presenta el siguiente ejemplo:
9.4 Función de activación
Una función de activación es una aplicación no lineal que se introduce después de una transformación afín, con el objetivo de dotar al modelo de la capacidad de aproximar funciones no lineales.
9.4.1 Definición
Sea \(x \in \mathbb{R}^n\) un vector de entrada, \(w \in \mathbb{R}^n\) un vector de pesos y \(b \in \mathbb{R}\) un sesgo. Se define la preactivación como:
\[ z = w^T x + b \tag{20}\]
La salida de la neurona está dada por:
\[ y = \sigma(z) \tag{21}\]
donde \(\sigma : \mathbb{R} \to \mathbb{R}\) es la función de activación.
9.4.2 No linealidad
Considérese una red neuronal profunda compuesta únicamente por transformaciones afines. En tal caso, la composición de dichas transformaciones satisface:
\[ f(x) = W_L W_{L-1} \cdots W_1 x + b' \]
lo cual sigue siendo una transformación afín. Por consiguiente, sin la introducción de funciones de activación no lineales, la red carece de capacidad expresiva para modelar relaciones no lineales.
En una red neuronal convolucional (CNN), la salida de una capa se expresa como:
\[ Y = \sigma\big( X \star K + b \big) \tag{22}\]
donde:
- \(X\) es el tensor de entrada
- \(\star\) denota la operación de correlación cruzada
- \(K\) es el conjunto de filtros (kernels)
- \(b\) es el sesgo
- \(\sigma\) se aplica elemento a elemento
9.4.3 Ejemplos de funciones de activación
Algunas de las funciones de activación más utilizadas son las siguientes: 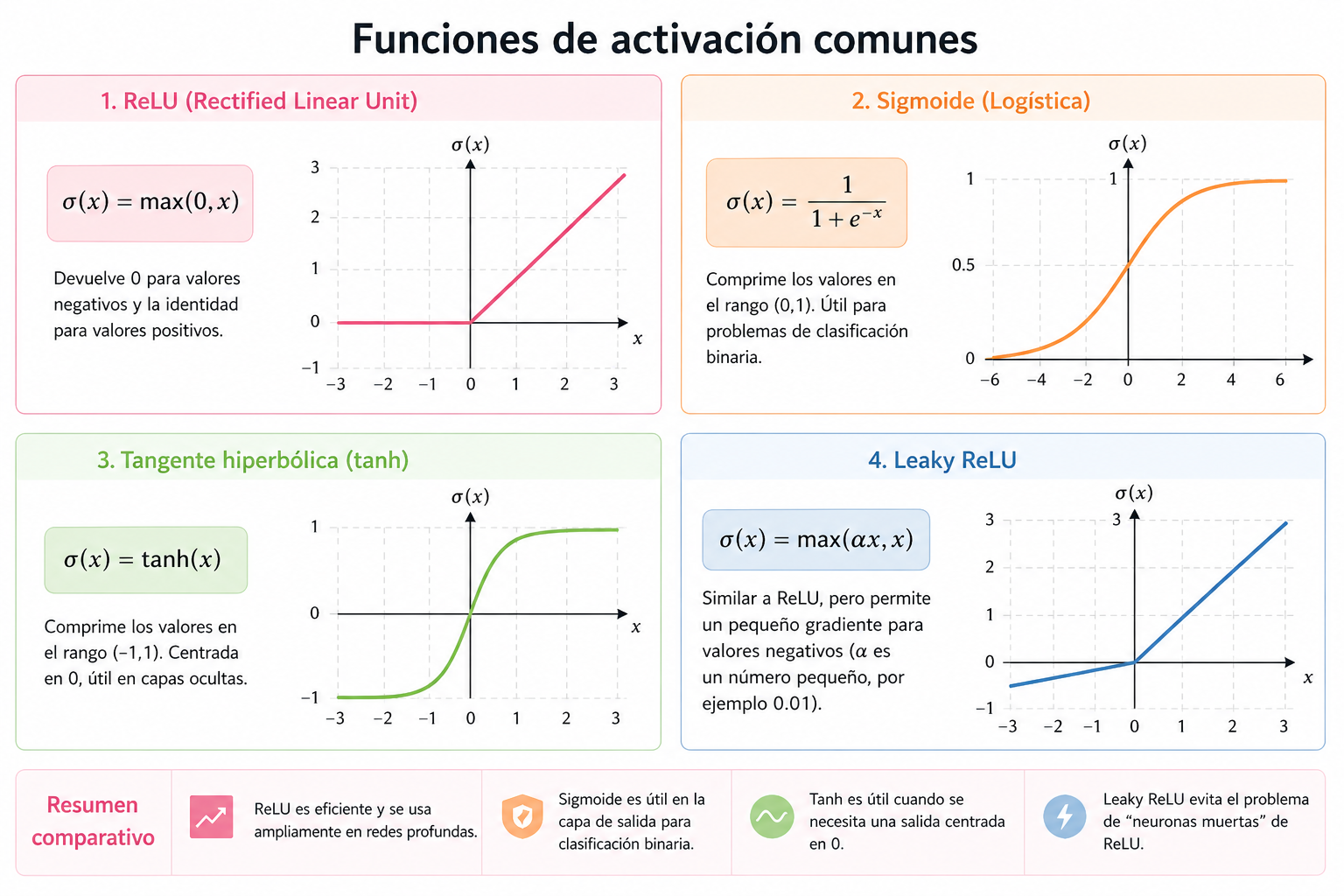
9.4.3.1 ReLU (Rectified Linear Unit)
\[ \sigma(x) = \max(0, x) \tag{23}\]
9.4.3.2 Sigmoide
\[ \sigma(x) = \frac{1}{1 + e^{-x}} \tag{24}\]
9.4.3.3 Tangente hiperbólica
\[ \sigma(x) = \tanh(x) \tag{25}\]
9.4.4 Propiedades fundamentales
Las funciones de activación empleadas en redes neuronales satisfacen típicamente:
- No linealidad, necesaria para incrementar la capacidad de representación del modelo
- Aplicación puntual (element-wise), preservando la estructura espacial en CNN
- Diferenciabilidad (al menos casi en todas partes), requisito esencial para métodos de optimización basados en gradiente
9.4.5 Formulación funcional
Desde una perspectiva funcional, una red neuronal profunda puede interpretarse como la composición de aplicaciones de la forma:
\[ f_\theta = \sigma_L \circ T_L \circ \cdots \circ \sigma_1 \circ T_1 \tag{26}\]
donde cada transformación afín está dada por:
\[ T_i(x) = W_i x + b_i \]
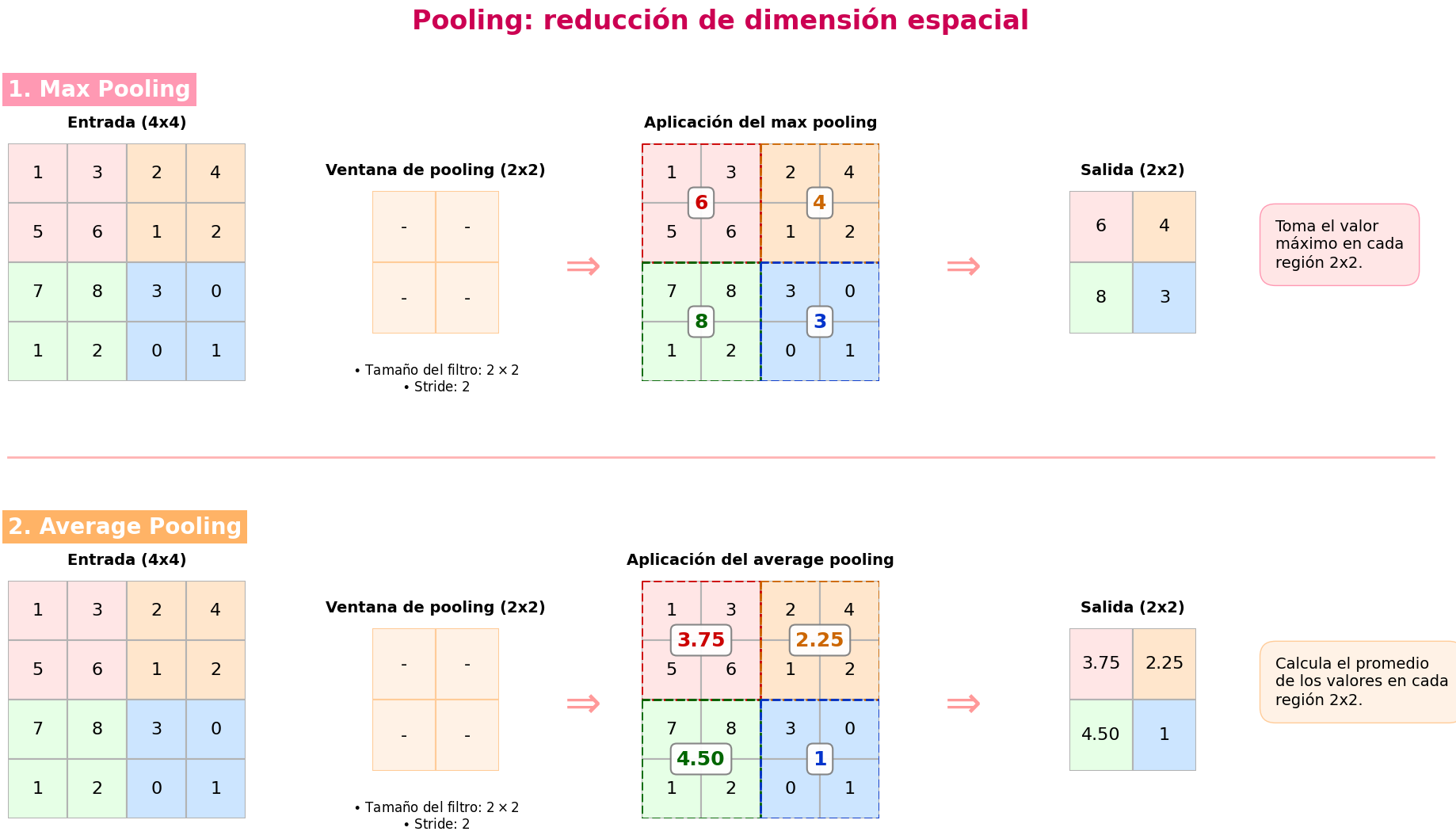
9.5 Pooling
El pooling es una operación que reduce la dimensión espacial de la representación, conservando las características más relevantes. Esta operación se aplica de manera independiente en cada canal del tensor de entrada.
Sea:
\[ X \in \mathbb{R}^{H \times W \times C} \]
la entrada de la capa. El pooling produce una salida:
\[ Y \in \mathbb{R}^{H' \times W' \times C} \]
donde las dimensiones \(H'\) y \(W'\) son menores que \(H\) y \(W\).
9.5.1 Max Pooling
El max pooling es la forma más común de pooling. Para cada región local \(X_{(i,j)}\), se define:
\[ Y(i,j,c) = \max_{(u,v) \in \mathcal{R}} X(i+u, j+v, c) \tag{27}\]
donde \(\mathcal{R}\) representa la ventana de pooling (por ejemplo, de tamaño \(2 \times 2\)).
9.5.2 Average Pooling
Otra variante es el average pooling, definido como:
\[ Y(i,j,c) = \frac{1}{|\mathcal{R}|} \sum_{(u,v) \in \mathcal{R}} X(i+u, j+v, c) \tag{28}\] El pooling sirve para reducir las dimensiones espaciales (ancho y alto) de un tensor, asegurando que se conserve la información más relevante. Aplicar esta técnica brinda grandes beneficios a los modelos: disminuye significativamente el costo computacional, introduce invariancia a pequeñas traslaciones en la imagen y ayuda a prevenir el sobreajuste. Además, es importante destacar que esta reducción se aplica de manera independiente a cada canal de profundidad del tensor
9.5.3 Propiedades
El pooling presenta las siguientes propiedades:
- Reduce la dimensionalidad espacial, disminuyendo el costo computacional
- Introduce una cierta invariancia a traslaciones pequeñas
- Opera de forma independiente en cada canal
9.5.4 Interpretación
El pooling puede interpretarse como una forma de resumen local de la información. En el caso del max pooling, se selecciona la característica más prominente dentro de cada región, mientras que el average pooling produce una media de las intensidades.
En arquitecturas profundas, el pooling contribuye a la construcción de representaciones más abstractas, al reducir progresivamente la resolución espacial.
9.6 Capas completamente conectadas
Las capas completamente conectadas (Fully Connected, FC) constituyen la etapa final de una red neuronal convolucional. Su función es combinar las características extraídas por las capas anteriores para realizar la tarea de clasificación o regresión.
9.6.1 Vectorización de la entrada
Sea:
\[ X \in \mathbb{R}^{H \times W \times C} \]
la salida de la última capa convolucional. Esta se transforma en un vector mediante una operación de vectorización:
\[ x = \mathrm{vec}(X) \in \mathbb{R}^{HWC} \tag{29}\]
9.6.2 Transformación afín
La capa completamente conectada aplica una transformación lineal seguida de un sesgo:
\[ z = Wx + b \tag{30}\]
donde:
- \(W \in \mathbb{R}^{k \times HWC}\) es la matriz de pesos
- \(b \in \mathbb{R}^{k}\) es el vector de sesgos
- \(k\) es el número de neuronas en la capa
9.6.3 Aplicación de la función de activación
La salida de la capa está dada por:
\[ y = \sigma(z) \tag{31}\]
donde \(\sigma\) es una función de activación aplicada componente a componente.
9.6.4 Interpretación
Las capas completamente conectadas pueden interpretarse como clasificadores que operan sobre las características extraídas por la red convolucional. En particular, cada neurona combina toda la información disponible en la representación vectorizada.
Esto contrasta con las capas convolucionales, donde la conectividad es local.
9.6.5 Clasificación
En problemas de clasificación multiclase, la última capa suele utilizar la función softmax, definida como:
\[ \text{softmax}(z_i) = \frac{e^{z_i}}{\sum_{j=1}^{k} e^{z_j}} \tag{32}\]
Esta función transforma el vector \(z\) en una distribución de probabilidad sobre las clases.
9.6.6 Propiedades
Las capas completamente conectadas presentan las siguientes características:
- Conectividad global: cada neurona está conectada con todas las entradas
- Alta capacidad de representación
- Mayor número de parámetros en comparación con capas convolucionales
9.6.7 Observación
Debido al elevado número de parámetros, las capas completamente conectadas son más propensas al sobreajuste. Por esta razón, en arquitecturas modernas, su uso se reduce o se reemplaza parcialmente mediante técnicas como global average pooling.
9.7 Función de pérdida
La función de pérdida (loss function) cuantifica la discrepancia entre las predicciones del modelo y los valores reales. Constituye el criterio fundamental que guía el proceso de entrenamiento, ya que permite evaluar la calidad de las predicciones y definir un objetivo de optimización.
9.7.1 Definición general
Sea \(f_\theta(x)\) la salida del modelo para una entrada \(x\), y sea \(y\) la etiqueta real asociada. Una función de pérdida se define como:
\[ \mathcal{L}(f_\theta(x), y) \]
donde \(\mathcal{L} : \mathbb{R}^k \times \mathbb{R}^k \to \mathbb{R}\) mide el error entre la predicción y el valor objetivo.
Dado un conjunto de datos \(\{(x_i, y_i)\}_{i=1}^{N}\), la función de costo global se define como:
\[ J(\theta) = \frac{1}{N} \sum_{i=1}^{N} \mathcal{L}(f_\theta(x_i), y_i) \tag{33}\]
9.7.2 Clasificación multiclase: Entropía cruzada
En problemas de clasificación multiclase, la función de pérdida más utilizada es la entropía cruzada (cross-entropy).
Sea \(p = f_\theta(x)\) la salida del modelo después de aplicar la función softmax, y sea \(y\) un vector one-hot que representa la clase verdadera. La pérdida se define como:
\[ \mathcal{L}(p, y) = - \sum_{j=1}^{k} y_j \log(p_j) \tag{34}\]
Dado que \(y\) es un vector one-hot, esta expresión se reduce a:
\[ \mathcal{L}(p, y) = -\log(p_{y}) \]
donde \(p_y\) es la probabilidad asignada a la clase correcta.
9.7.3 Interpretación probabilística
La entropía cruzada puede interpretarse como una medida de divergencia entre la distribución verdadera \(y\) y la distribución predicha \(p\). Minimizar esta función equivale a maximizar la probabilidad de observar los datos bajo el modelo.
Desde un punto de vista estadístico, este enfoque corresponde al método de máxima verosimilitud.
9.7.4 Caso de regresión: Error cuadrático medio
En problemas de regresión, una función de pérdida común es el error cuadrático medio (Mean Squared Error, MSE), definido como:
\[ \mathcal{L}(f_\theta(x), y) = \| f_\theta(x) - y \|^2 \tag{35}\]
Esta función penaliza de manera más severa los errores grandes, lo que favorece ajustes más precisos.
9.7.5 Relación con el entrenamiento
El objetivo del entrenamiento consiste en encontrar los parámetros \(\theta\) que minimizan la función de costo global:
\[ \theta^* = \arg\min_{\theta} J(\theta) \tag{36}\]
Este problema se resuelve típicamente mediante métodos de optimización iterativos, como el descenso por gradiente y sus variantes.
9.8 Entrenamiento
El entrenamiento de una red neuronal convolucional consiste en ajustar los parámetros \(\theta\) del modelo con el objetivo de minimizar la función de pérdida definida previamente.
Dado un conjunto de datos \(\{(x_i, y_i)\}_{i=1}^{N}\), el problema de entrenamiento puede formularse como:
\[ \min_{\theta} J(\theta) = \frac{1}{N} \sum_{i=1}^{N} \mathcal{L}(f_\theta(x_i), y_i) \tag{37}\]
9.8.1 Método del descenso del gradiente
Considérese el problema de optimización irrestricta
\[ \min_{x \in \mathbb{R}^n} f(x), \]
donde \(f:\mathbb{R}^n \to \mathbb{R}\) es una función diferenciable. El objetivo consiste en construir un procedimiento iterativo que permita aproximarse a un punto minimizante de \(f\). Entre los métodos más importantes para resolver este tipo de problemas se encuentra el método del descenso del gradiente, también conocido como gradient descent o método del máximo descenso.
La idea fundamental del método proviene de la interpretación geométrica del gradiente. Para una función diferenciable \(f\), el vector gradiente
\[ \nabla f(x) = \begin{pmatrix} \dfrac{\partial f}{\partial x_1}(x) \\ \dfrac{\partial f}{\partial x_2}(x) \\ \vdots \\ \dfrac{\partial f}{\partial x_n}(x) \end{pmatrix} \]
indica la dirección de máximo crecimiento local de la función en el punto \(x\). En consecuencia, el vector opuesto
\[ -\nabla f(x) \]
corresponde a la dirección de máximo decrecimiento local. El método del descenso del gradiente aprovecha precisamente esta propiedad para generar una sucesión de iterados que produzca una disminución progresiva del valor de la función objetivo.
Partiendo de un punto inicial \(x_0 \in \mathbb{R}^n\), el método construye una sucesión \(\{x_k\}\) definida mediante la iteración
\[ x_{k+1} = x_k - \alpha_k \nabla f(x_k), \]
donde \(\alpha_k > 0\) representa el tamaño de paso asociado a la iteración \(k\). La elección de este parámetro resulta fundamental para el desempeño del algoritmo, pues determina la magnitud del desplazamiento realizado en la dirección de descenso.
La justificación matemática del método se obtiene a partir de la noción de dirección de descenso. Sea
\[ d_k = -\nabla f(x_k). \]
Entonces,
\[ \nabla f(x_k)^T d_k = \nabla f(x_k)^T(-\nabla f(x_k)) = -\|\nabla f(x_k)\|^2. \]
Si \(\nabla f(x_k)\neq 0\), se tiene que
\[ \|\nabla f(x_k)\|^2 > 0, \]
y por tanto
\[ \nabla f(x_k)^T d_k < 0. \]
Esto demuestra que \(d_k\) constituye una dirección estricta de descenso para la función \(f\). En otras palabras, existe un valor suficientemente pequeño de \(\alpha > 0\) tal que
\[ f(x_k+\alpha d_k) < f(x_k). \]
Esta propiedad puede analizarse con mayor detalle mediante el desarrollo de Taylor de primer orden. Para \(\alpha\) pequeño se tiene
\[ f(x_k+\alpha d_k) = f(x_k) + \alpha \nabla f(x_k)^T d_k + o(\alpha). \]
Sustituyendo \(d_k=-\nabla f(x_k)\), resulta
\[ f(x_k-\alpha \nabla f(x_k)) = f(x_k) - \alpha \|\nabla f(x_k)\|^2 + o(\alpha). \]
Debido a que el término dominante es negativo, el valor de la función disminuye localmente para valores suficientemente pequeños de \(\alpha\). Esta observación constituye la base teórica del algoritmo.
La selección del tamaño de paso \(\alpha_k\) es uno de los aspectos centrales del método. Una posibilidad consiste en utilizar un paso constante,
\[ \alpha_k = \alpha, \]
lo cual simplifica considerablemente la implementación. Sin embargo, si el valor de \(\alpha\) es demasiado grande, la sucesión puede divergir o presentar oscilaciones; por el contrario, si \(\alpha\) es demasiado pequeño, la convergencia puede resultar excesivamente lenta.
Otra estrategia consiste en determinar el tamaño de paso mediante una búsqueda lineal exacta. En este caso, \(\alpha_k\) se obtiene resolviendo el problema unidimensional
\[ \alpha_k = \arg\min_{\alpha>0} f(x_k-\alpha \nabla f(x_k)). \]
De esta manera, en cada iteración se minimiza exactamente la función sobre la recta definida por la dirección de descenso. Aunque este enfoque posee una sólida justificación teórica, en problemas de gran dimensión suele resultar costoso desde el punto de vista computacional. Por esta razón, frecuentemente se emplean búsquedas lineales inexactas basadas en criterios como las condiciones de Armijo o de Wolfe, las cuales garantizan una reducción suficiente de la función objetivo sin resolver completamente el subproblema unidimensional.
El criterio de terminación más habitual se basa en la norma del gradiente. Dado que un punto minimizante diferenciable debe satisfacer la condición necesaria de primer orden
\[ \nabla f(x^\ast)=0, \]
el algoritmo suele detenerse cuando
\[ \|\nabla f(x_k)\| < \varepsilon, \]
para cierta tolerancia \(\varepsilon > 0\).
Las propiedades de convergencia del método dependen de las características de la función objetivo. Si \(f\) es convexa y su gradiente es Lipschitz continuo, entonces la sucesión generada por el método converge hacia un mínimo global. Más aún, si \(f\) es fuertemente convexa, es decir, si existe \(\mu>0\) tal que
\[ f(y) \geq f(x) + \nabla f(x)^T(y-x) + \frac{\mu}{2}\|y-x\|^2, \]
entonces el método presenta convergencia lineal para elecciones apropiadas del tamaño de paso.
Para ilustrar el procedimiento, considérese la función cuadrática
\[ f(x,y)=x^2+y^2. \]
Su gradiente está dado por
\[ \nabla f(x,y) = \begin{pmatrix} 2x\\ 2y \end{pmatrix}. \]
En consecuencia, la iteración del descenso del gradiente toma la forma
\[ \begin{pmatrix} x_{k+1}\\ y_{k+1} \end{pmatrix} = \begin{pmatrix} x_k\\ y_k \end{pmatrix} - \alpha \begin{pmatrix} 2x_k\\ 2y_k \end{pmatrix}, \]
lo cual equivale a
\[ x_{k+1}=(1-2\alpha)x_k, \qquad y_{k+1}=(1-2\alpha)y_k. \]
La convergencia hacia el origen ocurre siempre que
\[ 0<\alpha<1. \]
A pesar de su simplicidad y relevancia teórica, el método del descenso del gradiente posee ciertas limitaciones. En funciones mal condicionadas, la trayectoria de los iterados puede presentar oscilaciones pronunciadas y convergencia lenta, especialmente en regiones con geometría alargada o estrecha. Asimismo, en problemas no convexos el método puede converger hacia mínimos locales o puntos silla.
No obstante, el descenso del gradiente constituye la base conceptual de numerosos algoritmos modernos de optimización y aprendizaje automático, entre ellos el descenso estocástico del gradiente, los métodos con momentum, Nesterov, AdaGrad, RMSProp y Adam. Además, mantiene una estrecha relación con métodos de segundo orden como Newton y los algoritmos quasi-Newton.
Finalmente, el método admite una interpretación continua particularmente elegante. La iteración discreta puede verse como una aproximación numérica de la ecuación diferencial
\[ \frac{dx(t)}{dt} = -\nabla f(x(t)), \]
conocida como flujo de gradiente (gradient flow). Esta ecuación describe una dinámica continua en la cual el sistema evoluciona siguiendo la dirección de máximo decrecimiento de la función energía \(f\).
9.8.2 Regla de la cadena y retropropagación
El cálculo del gradiente en redes neuronales profundas se realiza mediante el algoritmo de retropropagación (backpropagation), el cual se basa en la aplicación sistemática de la regla de la cadena.
Sea una red expresada como:
\[ f_\theta = f^{(L)} \circ \cdots \circ f^{(1)} \]
el gradiente de la pérdida respecto a los parámetros de una capa \(l\) se obtiene propagando el error desde la salida hacia las capas anteriores.
Este procedimiento permite calcular eficientemente:
\[ \nabla_{\theta^{(l)}} J(\theta) \]
para cada capa \(l\) de la red.
9.9 Regularización
En el entrenamiento de redes neuronales, es común que el modelo se ajuste excesivamente a los datos de entrenamiento, fenómeno conocido como sobreajuste (overfitting). En este caso, el modelo presenta un buen desempeño en los datos de entrenamiento, pero generaliza pobremente a datos no vistos.
La regularización consiste en un conjunto de técnicas diseñadas para mejorar la capacidad de generalización del modelo.
9.9.1 Sobreajuste
El sobreajuste ocurre cuando el modelo aprende no solo las características relevantes del problema, sino también el ruido presente en los datos. Esto suele suceder cuando el modelo tiene una alta capacidad de representación en relación con la cantidad de datos disponibles.
9.9.2 Penalización de parámetros (Weight Decay)
Una estrategia común consiste en añadir un término de penalización a la función de costo:
\[ J(\theta) = \frac{1}{N} \sum_{i=1}^{N} \mathcal{L}(f_\theta(x_i), y_i) + \lambda \|\theta\|^2 \tag{38}\]
donde:
- \(\lambda > 0\) es el parámetro de regularización
- \(\|\theta\|^2\) es la norma cuadrática de los parámetros
Este término penaliza valores grandes de los parámetros, favoreciendo modelos más simples.
9.9.3 Dropout
El dropout es una técnica de regularización utilizada en redes neuronales profundas cuyo objetivo principal es reducir el sobreajuste y mejorar la capacidad de generalización del modelo. La idea esencial consiste en introducir aleatoriedad durante el entrenamiento mediante la desactivación temporal de neuronas. Como consecuencia, en cada iteración se entrena efectivamente una subred distinta de la arquitectura original.
Consideremos una capa neuronal cuya entrada es un vector
\[ x \in \mathbb{R}^{H\times W\times C}, \]
con matriz de pesos
\[ W \in \mathbb{R}^{m\times d} \]
donde hay \(m\) neuronas. Y vector de sesgos
\[ b\in\mathbb{R}^m. \]
La salida usual de la capa está dada por
\[ h=\phi(Wx+b). \]
El mecanismo de dropout introduce un vector aleatorio
\[ r=(r_1,\dots,r_m), \]
cuyas componentes son independientes y satisfacen
\[ r_i\sim\operatorname{Bernoulli}(p). \] Aquí, el parámetro \(p\in(0,1]\) representa la probabilidad de conservar activa una neurona durante el entrenamiento. En consecuencia, cada neurona tiene probabilidad \(1-p\) de ser anulada temporalmente.
La nueva activación de la capa se define entonces por
\[ \tilde h=r\odot h, \]
donde \(\odot\) denota el producto componente a componente. De esta forma, si \(r_i=0\), la activación correspondiente desaparece completamente en esa iteración; si \(r_i=1\), la neurona permanece activa.
En implementaciones modernas suele utilizarse la variante denominada inverted dropout, en la cual las activaciones se reescalan durante el entrenamiento:
\[ \tilde h=\frac{r}{p}\odot h. \]
La razón matemática de este reescalamiento es preservar el valor esperado de las activaciones. En efecto, puesto que
\[ \mathbb{E}[r_i]=p, \]
se obtiene
\[ \mathbb{E}\left[\frac{r_i}{p}h_i\right] = \frac{1}{p}\mathbb{E}[r_i]h_i = h_i. \]
Por tanto, el valor esperado de las activaciones permanece invariante:
\[ \mathbb{E}[\tilde h]=h. \]
Gracias a esta propiedad, durante la etapa de inferencia no es necesario realizar ajustes adicionales: simplemente se utiliza la red completa sin eliminar neuronas.
Desde un punto de vista probabilístico, el dropout puede interpretarse como un procedimiento que entrena simultáneamente un gran conjunto de subredes. Si una red posee \(n\) neuronas susceptibles de ser desactivadas, entonces existen potencialmente
\[ 2^n \]
subredes distintas. El entrenamiento explícito de todas ellas sería computacionalmente inviable; sin embargo, el dropout proporciona una aproximación eficiente a un promedio implícito sobre dicho ensamble de modelos.
La relevancia de esta idea se encuentra en que las redes neuronales poseen una enorme capacidad de representación y, por ello, pueden memorizar patrones específicos del conjunto de entrenamiento. Cuando ciertas neuronas dependen excesivamente de otras, aparecen fenómenos de co-adaptación. El dropout rompe estas dependencias debido a que cualquier neurona puede desaparecer aleatoriamente durante el entrenamiento. Como consecuencia, cada unidad debe aprender representaciones más independientes y robustas.
Formalmente, el entrenamiento ya no minimiza una función de pérdida determinista, sino una pérdida esperada respecto de la aleatoriedad introducida por las máscaras de dropout. Si \(m\) representa una realización particular de la máscara aleatoria y \(\theta\) denota el conjunto de parámetros de la red, entonces el problema de optimización puede escribirse como
\[ \min_\theta \; \mathbb{E}_m \left[ \mathcal{L}(f(x;m,\theta),y) \right]. \]
Aquí, \(f(x;m,\theta)\) representa la subred inducida por la máscara \(m\). Así, cada actualización del descenso del gradiente se realiza sobre una arquitectura ligeramente distinta.
Si el descenso del gradiente estándar actualiza parámetros mediante
\[ \theta_{t+1} = \theta_t - \eta\nabla_\theta\mathcal{L}(\theta_t), \]
entonces bajo dropout la actualización toma la forma
\[ \theta_{t+1} = \theta_t - \eta \nabla_\theta \mathcal{L}(f(x;m_t,\theta_t),y), \]
donde \(m_t\) es una máscara aleatoria distinta en cada iteración. Este ruido adicional actúa como un mecanismo regularizador que dificulta el ajuste excesivamente preciso a los datos de entrenamiento.
En ciertos modelos simples, particularmente lineales, puede demostrarse que el dropout induce aproximadamente un efecto regularizador semejante a una penalización cuadrática sobre los pesos. En este sentido, su comportamiento se relaciona parcialmente con métodos de regularización tipo \(L^2\), aunque el mecanismo subyacente es distinto, ya que aquí la regularización surge a partir de una perturbación aleatoria multiplicativa.
Desde una perspectiva geométrica, el dropout favorece representaciones distribuidas y estables frente a perturbaciones. Una neurona no puede depender de la presencia permanente de otras unidades, de modo que la información relevante termina siendo compartida entre múltiples componentes de la red. Esto produce modelos menos frágiles y con mejor capacidad de generalización.
Aunque arquitecturas modernas incorporan otros mecanismos de regularización, como Batch Normalization y conexiones residuales, el dropout continúa siendo una herramienta fundamental, especialmente en redes densas tradicionales y en problemas donde la cantidad de datos disponibles es limitada.
9.10 Optimización
El proceso de entrenamiento de una red neuronal implica la resolución de un problema de optimización en alta dimensión. En la práctica, este problema se aborda mediante métodos iterativos basados en gradiente.
9.10.1 Descenso por gradiente estocástico (SGD)
En lugar de utilizar todo el conjunto de datos en cada iteración, el Stochastic Gradient Descent (SGD) emplea subconjuntos (mini-batches):
\[ \theta \leftarrow \theta - \eta \nabla_{\theta} \mathcal{L}(f_\theta(x_i), y_i) \]
Este enfoque reduce el costo computacional y permite actualizaciones más frecuentes.
9.10.2 Mini-batch gradient descent
Una generalización del SGD consiste en utilizar lotes de tamaño intermedio:
\[ \theta \leftarrow \theta - \eta \frac{1}{B} \sum_{i=1}^{B} \nabla_{\theta} \mathcal{L}(f_\theta(x_i), y_i) \tag{39}\]
donde \(B\) es el tamaño del lote.
9.10.3 Métodos adaptativos
Existen métodos de optimización que ajustan automáticamente la tasa de aprendizaje para cada parámetro. Uno de los más utilizados es Adam.
El algoritmo Adam combina ideas de momento y escalamiento adaptativo del gradiente. De manera simplificada, realiza actualizaciones de la forma:
\[ \theta \leftarrow \theta - \eta \frac{m_t}{\sqrt{v_t} + \epsilon} \]
donde:
- \(m_t\) es el promedio exponencial de los gradientes
- \(v_t\) es el promedio exponencial de los gradientes al cuadrado
- \(\epsilon\) es un término de estabilidad numérica
9.10.4 Tasa de aprendizaje
La tasa de aprendizaje \(\eta\) controla la magnitud de las actualizaciones. Su elección es crucial:
- valores pequeños producen convergencia lenta
- valores grandes pueden causar inestabilidad
En la práctica, se utilizan esquemas de decaimiento de la tasa de aprendizaje.